-
기본정보
-
하드웨어
-
시스템 설정
-
카메라 보정
-
Unreal엔진에서 실시간 구성
-
FAQ
- 베이스 스테이션을 몇 대 사용할 수 있나요?
- 베이스 스테이션의 홀수를 사용할 수 있나요?
- 베이스 스테이션 청소하기
- 하나 이상의 VIVE 트래커(3.0)를 사용해도 되나요?
- VIVE 트래커(3.0)가 자동으로 꺼지는 이유는 무엇인가요?
- VIVE 트래커(3.0)가 감지되었음을 확인하는 방법은 무엇인가요?
- VIVE 트래커(3.0) 상태등은 무엇을 의미하나요?
- Mars 대시보드의 VIVE 트래커(3.0) 상태 아이콘이 파란색으로 바뀌지 않는 이유는 무엇인가요?
- VIVE 트래커(3.0) 문제 해결
- 카메라 보정 도구에서 수신 비디오 피드가 보이지 않는데, 그 이유는 무엇입니까?
Rover
Rover에서는 VIVE 트래커(3.0)에서 Mars로 트래킹 데이터를 보냅니다.
Rover에서는 VIVE 트래커(3.0)에서 트래킹 데이터를 수집하고 Mars로 릴레이하여 신호를 새로 고치고 신호 저하를 방지합니다.
Rover는 렌즈 인코더가 가상 프로덕션 엔진에서 사용할 수 있는 데이터로 변환할 수 있는 FIZ(Focus(초점), Iris(홍채), 줌(zoom)) 데이터를 전송합니다.. VIVE Mars CamTrack은 LOLED Indiemark 렌즈 인코더를 지원합니다.
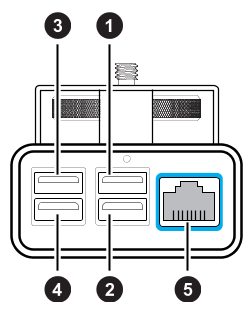
| 1 | USB Type-A 포트 1 | VIVE 트래커(3.0)에 대한 기본 연결 포트 |
| 2 | USB Type-A 포트 2 | 이 포트를 통해 줌 데이터를 전송할 수 있습니다 |
| 3 | USB Type-A 포트 3 | 이 포트를 통해 초점 데이터를 전송할 수 있습니다 |
| 4 | USB Type-A 포트 4 | 이 포트를 통해 홍채 데이터를 전송할 수 있습니다 |
| 5 | 이더넷 포트 | Rover를 Mars에 연결하여 트래킹 데이터를 전송할 경우 |
이 항목이 도움이 되었나요?
예
아니오
제출
감사합니다! 귀하의 피드백은 다른 사람들이 가장 도움이 되는 정보를 보는 데 도움이 됩니다.