-
簡介
-
硬體
-
系統設置
-
攝影機校正
-
在 Unreal Engine 上即時合成
-
常見問題集
使用攝影機校正工具收集校正資料
攝影機校正工具可拍攝影像來建立校正資料,您可以將資料匯入虛擬製片引擎以校正您的攝影機。
如果尚未下載攝影機校正工具,請造訪 www.vive.com/mars/cct。
-
Rover 的正面與攝影機鏡頭平行,將 Rover 模組安裝至攝影機。
 注意: Rover 底部的內螺紋深度為 5.5 公釐。為了避免在安裝時造成 Rover 或攝影機受損,請確保攝影機上的外螺紋不超過 4.5 公釐。
注意: Rover 底部的內螺紋深度為 5.5 公釐。為了避免在安裝時造成 Rover 或攝影機受損,請確保攝影機上的外螺紋不超過 4.5 公釐。 -
在電腦上開啟攝影機校正工具,輸入 Mars IP 和連接埠號碼,然後按一下 Connect。

-
從 Video source 下拉式選單中選取影片拍攝裝置。
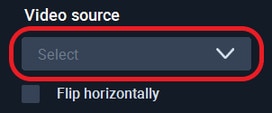
提示: 如果影片源在 x 軸上翻轉,您可以選擇 Flip horizontally 來修正。
-
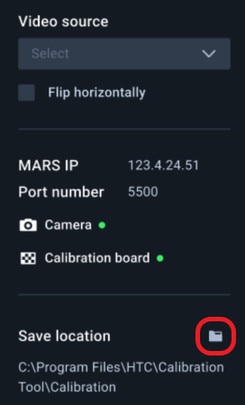
至於 Save location,請按一下資料夾圖示
 並選取影像和校正資料的目的地資料夾。
並選取影像和校正資料的目的地資料夾。
- 按一下播放按鈕開始校正程序。
-
移動攝影機,讓棋盤圖案位於紅框內。
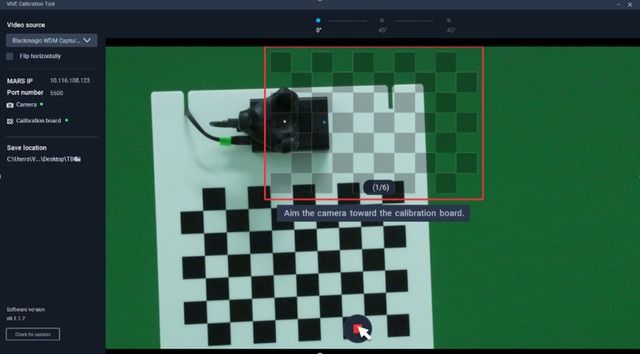
邊框將變為藍色,攝影機校正工具將會拍攝影像。
- 依需求移動攝影機來拍攝更多影像,直到系統提示您旋轉校正板。
-
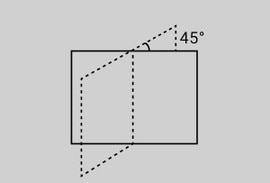
將校正板旋轉 45 度 (逆時針),然後按一下 Continue 並拍攝第二組影像。
拍攝第二組影像後,系統會提示您將校正板朝反方向旋轉 45 度。
-
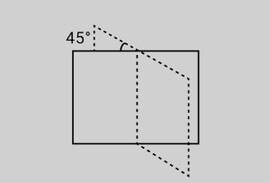
將校正板順時針旋轉 45 度 (-45 度)、按一下 Continue,然後拍攝第三組也是最後一組影像。
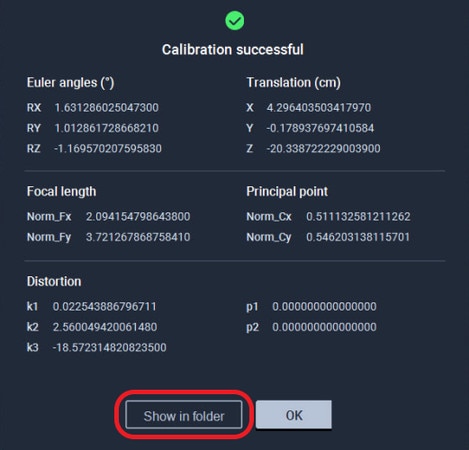
攝影機校正工具將處理影像並顯示結果。按一下 Show in folder 以開啟包含影像和校正資料的儲存位置。
-
將校正資料匯入您的虛擬製片引擎以校正攝影機。
如需詳細資訊,請參閱將校正資料匯入 Unreal Engine。
這對您有幫助嗎?
是
否
送出
感謝您!您的意見回報可協助他人查看最實用的資訊。