Recueillir les données d'étalonnage à l'aide de l'Outil d'étalonnage de la caméra
L'Outil d'étalonnage de la caméra capture des images pour générer des données d'étalonnage que vous pouvez importer dans votre moteur de production virtuel pour étalonner votre caméra.
Si vous n'avez pas téléchargé l'Outil d'étalonnage de la caméra, visitez www.vive.com/mars/cct.
-
Fixez un module Rover à votre caméra, la face avant du Rover étant parallèle à l'objectif de la caméra.
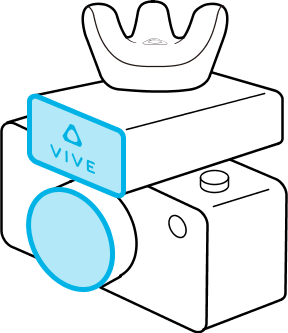 Remarque : Le filetage interne de la partie inférieure du Rover a une profondeur de 5,5 mm. Pour éviter d'endommager le Rover ou caméra pendant l'installation, assurez-vous que le filetage extérieur de votre caméra ne dépasse pas 4,5 mm.
Remarque : Le filetage interne de la partie inférieure du Rover a une profondeur de 5,5 mm. Pour éviter d'endommager le Rover ou caméra pendant l'installation, assurez-vous que le filetage extérieur de votre caméra ne dépasse pas 4,5 mm. -
Sur votre PC, ouvrez l'Outil d'étalonnage de la caméra, saisissez l'IP et le numéro de port du Mars, puis cliquez sur Connect.
 Conseil : Vous pouvez trouver l'IP du Mars sur le tableau de bord du Mars. Voir Mars pour des détails.
Conseil : Vous pouvez trouver l'IP du Mars sur le tableau de bord du Mars. Voir Mars pour des détails. -
Sélectionnez votre appareil de capture vidéo dans le menu déroulant Video source.
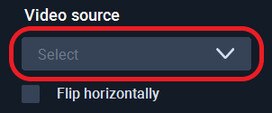
Conseil : Si le flux vidéo est inversé sur l'axe x, vous pouvez sélectionner Flip horizontally pour le corriger.
-
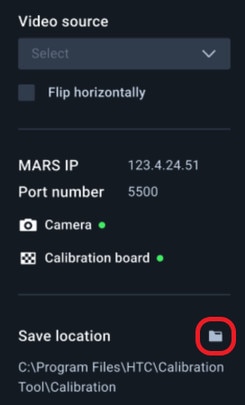
Pour Save location, cliquez sur l'icône de dossier
 et sélectionnez un dossier de destination pour les images et les données d'étalonnage.
et sélectionnez un dossier de destination pour les images et les données d'étalonnage.
-
Déplacez la caméra de sorte que le motif échiquier se trouve à l'intérieur du cadre rouge.
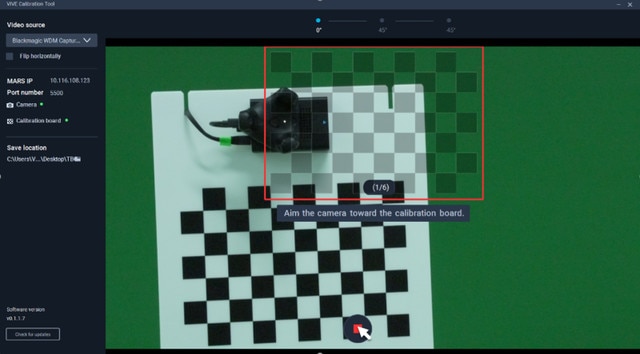
Le cadre devient bleu et l'Outil d'étalonnage de la caméra capture une image.
-
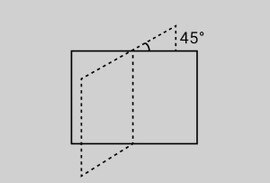
Faites pivoter la carte d'étalonnage de 45 degrés (sens antihoraire), puis cliquez sur Continue et capturez un second groupe d'images.
Après avoir capturé le second groupe d'images, il vous sera demandé de faire pivoter la carte de 45 degrés dans la direction opposée.
-
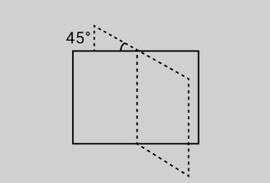
Faites pivoter la carte d'étalonnage de 45 degrés dans le sens horaire (-45 degrés), cliquez sur Continue, puis capturez le troisième et dernier groupe d'images.
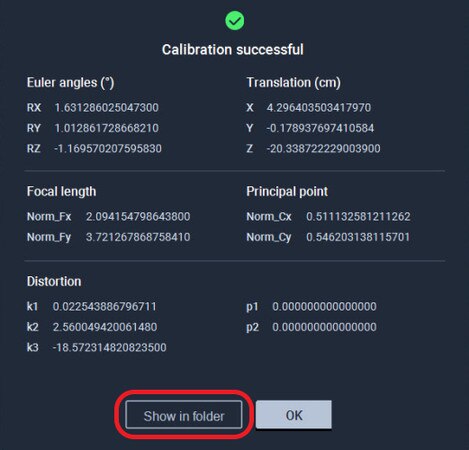
L'Outil d'étalonnage de la caméra traite les images et affiche les résultats. Cliquez sur Show in folder pour ouvrir l'emplacement d'enregistrement contenant les images et les données d'étalonnage.
Cela a-t-il été utile ?
Oui
Non
Merci ! Vos commentaires aident les autres à voir les informations les plus utiles.